Lame3D.edp
Resumen: En este ejemplo se considera el problema estacionario de Lamé 3D.
Problema
Sea
Denotamos
donde
Formulación débil
Sea
Multiplicando la ecuación de
Resolver este problema para
Observamos que:
con
Código
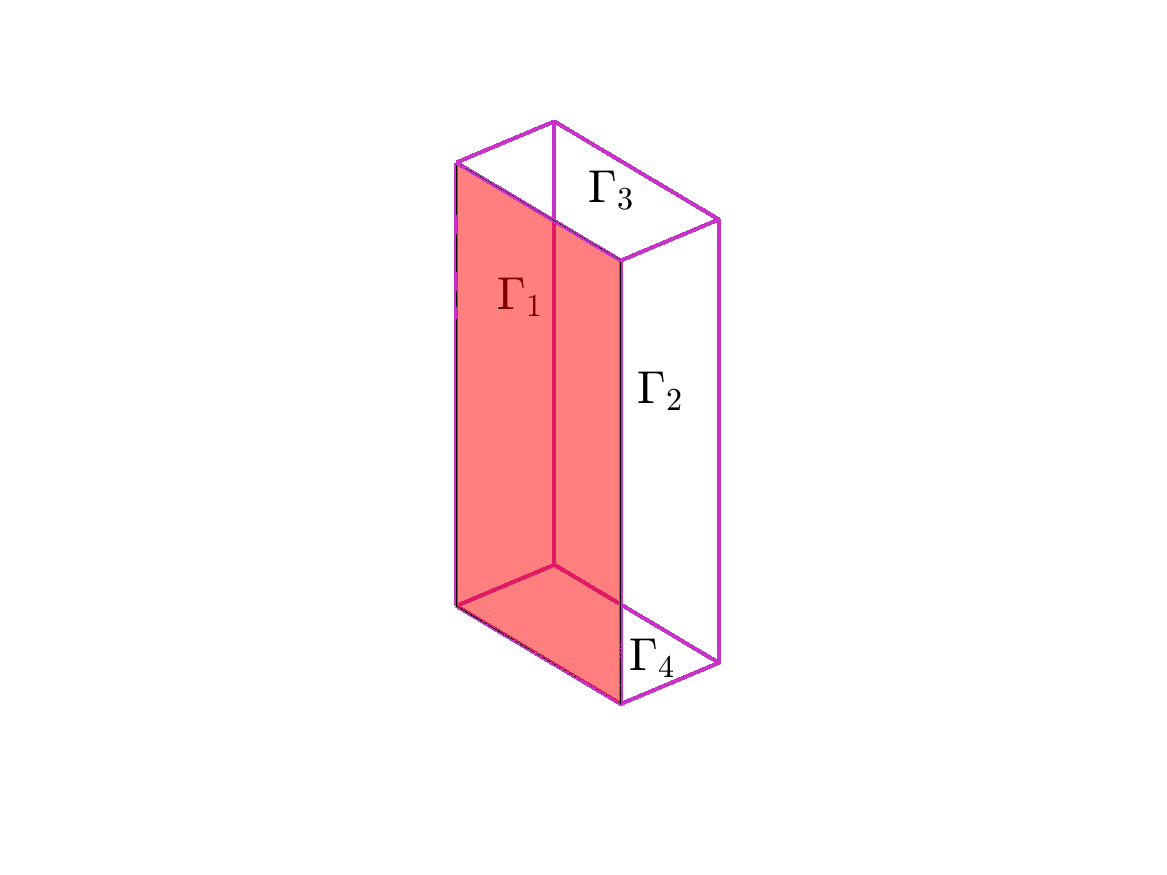
xxxxxxxxxx// Solution of stationary 3D Lame system of elasticity// | - \nabla \cdot \sigma(u) = f in \Omega = (0,1)x(0,2)x(0,4) // | \sigma(u) \cdot n = g on \Gamma_1 (x=1 side)// | \sigma(u) \cdot n = 0 on \Gamma_2\cup\Gamma_3 (other sides and top)// | u = 0 on \Gamma_4 (base)// \sigma(u) = 0.5\mu (\nabla u + \nabla u^T) + \lambda (\nabla \cdot u) Id.// Weak formulation// \int_\Omega ( 0.25\mu(\nabla u + \nabla u^T)\cdot(\nabla v + \nabla v^T) + // \lambda(\nabla \cdot u)(\nabla \cdot u) )// -\int_\Omega f\cdot v - \int_\gamma_1 g\cdot v = 0 \forall v
load "msh3" verbosity = 10; //// Data//real E = 21.e5; // Young modulusreal nu = 0.28; // Poisson ratioreal mu = E/(2.*(1.+nu)); // Lame coefficientsreal lambda = E*nu/((1.+nu)*(1.-2.*nu)); // Lame coefficientsreal gamma1=mu, gamma2=mu+lambda; // Other coefficients
func f1 = 0.; // External forcefunc f2 = 0.; // External forcefunc f3 = 0.; // External forcefunc g1 = -z; // Surface forcefunc g2 = 0.; // Surface forcefunc g3 = 0.; // Surface force
//// Auxiliary variables//real unsq2=1./sqrt(2.), coef=100.;
//// Macro definitions// macros MUST be ended by //macro epsilon(u1, u2, u3) [dx(u1), dy(u2), dz(u3), unsq2*(dy(u1)+dx(u2)), unsq2*(dz(u1)+dx(u3)), unsq2*(dz(u2)+dy(u3))] // EOMmacro div(u1, u2, u3) (dx(u1) + dy(u2) + dz(u3)) // EOM
//// 2D Mesh// Base domain : (0,1) x (0,2)real x0 = 0., x1 = 1.;real y0 = 0., y1 = 2.;int nx = 5, ny = 10, nz = 20; // steps in directions x, y, zint L2 = 1, L0 = 9; // 2D labels: C2 --> L2, C1,C3,C4 --> L0
border C1(s = x0, x1){x = s; y = y0; label = L0;}border C2(s = y0, y1){x = x1; y = s; label = L2;}border C3(s = x1, x0){x = s; y = y1; label = L0;}border C4(s = y1, y0){x = x0; y = s; label = L0;}plot(C1(nx) + C2(ny) + C3(nx) + C4(ny), wait = true);
mesh Th2d = buildmesh(C1(nx) + C2(ny) + C3(nx) + C4(ny));plot(Th2d, wait=true);
//// 3D mesh// Domain: (0,1) x (0,2) x (0,4)real z0 = 0., z1 = 4.;int Ltop = 13, Lbase = 15; int[int] rup = [0, Ltop,L0, L0, L2, L2], // upper face --> Ltop rdown = [0, Lbase, L0, L0, L2, L2], // lower face --> Lbase rmid = [L0, L0, L2, L2]; // lateral faces, L0 --> L0, L2 --> L2mesh3 Th3d = buildlayers(Th2d, nz, zbound = [z0,z1], labelmid = rmid, labelup = rup, labeldown = rdown);plot(Th3d, wait = true);
//// Finite element space//fespace Vh(Th3d,P2);Vh u1, u2, u3;Vh v1, v2, v3;Vh f1h = f1, f2h = f2, f3h = f3;Vh g1h = g1, g2h = g2, g3h = g3;
//// Problem//problem Lame3D([u1, u2, u3],[v1, v2, v3]) = int3d(Th3d)( lambda*(div(u1, u2, u3)*div(v1, v2, v3)) + mu*(epsilon(u1, u2, u3)'*epsilon(v1, v2, v3)) ) - int3d(Th3d)(f1h*v1 + f2h*v2 + f3h*v3) - int2d(Th3d,L2)(g1h*v1 + g2h*v2 + g3h*v3) + on(Lbase, u1 = 0., u2 = 0., u3 = 0.);Lame3D;
//// Plots//mesh3 Th3dd = movemesh3(Th3d, transfo = [x+coef*u1, y+coef*u2, z+coef*u3]);
int[int] re = [L0,0, L2,0, Ltop,0, Lbase,0], reg = [0,6];// Changing labels of original mesh for the plotTh3d = change(Th3d, refface = re);plot(Th3d, Th3dd, cmm = "Original and deformed mesh. Displacement multiplied by "+coef, wait = true);
Anna Doubova - Rosa Echevarría - Dpto. EDAN - Universidad de Sevilla